马尔可夫随机过程、奖励过程、决策过程#
重要!!!
涉及到马尔可夫过程,就必须要强调的两个概念:一个概念是所有状态的集合,一个概念是时间序列。
所有状态的集合使用数学符号 \mathcal{S} = \{s_1, s_2, ..., s_n\},其表示可以取到的状态值。在本文中其下标一般使用 n,表示总共有 n 个状态值。
时间序列使用数学符号 (S_1, S_2, ..., S_t, ..., S_T),其表示从初始时刻开始到 T 时刻做了一次采样之后得到的结果。在本文中其下标一般使用 t,表示在第 t 时刻所取到的状态。
在本文中,表示某一个状态值时使用小写的 s 来表示,表示某个时刻的状态时使用大写的 S 来表示。
刚开始看马尔可夫过程时,对这两个概念弄混了很久。
1、随机过程#
概率论的研究对象是静态的随机对象。随机过程(stochastic process)的研究对象是随时间演变的随机对象。
在随机过程中,某一时刻 t 的状态取值使用符号 S_t 表示(这里的 s 是单词 state 的首字母),所有可能的状态的集合使用符号 \mathcal{S} = \{s_1, s_2, ..., s_n\} 表示。
某个时刻 t 的状态取决于之前各个时刻的状态,也就是说,已知 (S_1, S_2, ..., S_t),那么下一时刻 t+1 的状态 S_{t+1} 的概率表示为 P(S_{t+1}|S_1, S_2, ..., S_t)。
2、马尔可夫随机过程(MP)#
2.1 马尔可夫性质#
马尔可夫性质(Markov property):某一时刻的状态仅取决于上一时刻的状态,用公式表示为 P(S_{t+1}|S_t) = P(S_{t+1}|S_1, S_2, ..., S_t)。
2.2 马尔可夫随机过程#
马尔可夫过程(Markov process)也称为马尔可夫链(Markov chain),指的是具有马尔可夫性质的随机过程。一般使用符号 <\mathcal{S}, \mathcal{P}> 表示。其中 \mathcal{S} 表示 有限个 状态的集合,\mathcal{P} 表示状态转移矩阵(state transition matrix)。
假设总共有 n 个状态,此时 \mathcal{S} 和 \mathcal{P} 的公式分别如下所示:
上述状态转移矩阵 \mathcal{P} 中第 i 行第 j 列的元素 P(s_j|s_i) 表示从状态 s_i 转移到状态 s_j 的概率。
从任一状态出发,转移到所有状态的概率之和必须为1,所以在状态转移矩阵 \mathcal{P} 中每一行元素之和为1。
对于那些只进不出的状态(在状态转移矩阵 \mathcal{P} 中表现为以1的概率转移到自身),一般称其为终止状态(terminal state)。
给定了 \mathcal{S} 和 \mathcal{P} 之后就意味着给定了马尔可夫过程。给定了一个马尔可夫过程之后,就可以从某一个状态出发,根据其状态转移矩阵生成一个状态序列(episode)。这种操作一般称为采样(sampling)。
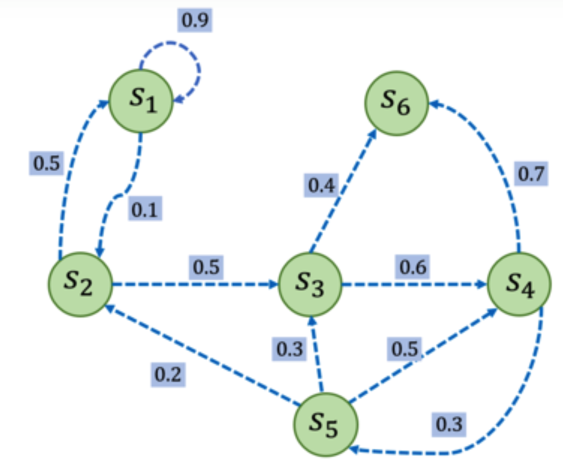
下图就是一个马尔可夫过程的例子,下图中的每个点就是一个状态,每个边对应着状态转移矩阵中的一个元素(转移概率为0的都省略了没有画出来)。可以看出下图中的 s6 节点只进不出,所以其就是一个终止节点。
3、马尔可夫奖励过程(MRP)#
3.1 奖励过程#
马尔可夫奖励过程(Markov reward process)就是在马尔可夫过程的基础上增加上奖励函数 r 和折扣因子 \gamma。
某个状态的奖励函数 r(s) 指的是转移到该状态可以获得的奖励的期望。
折扣因子(discount factor) \gamma 的取值范围是 [0, 1)。引入折扣因子的作用是长期的奖励具有一定的不确定性,折扣因子的作用就是对长期的奖励打一个折扣、做一个衰减,更关注近期的奖励。\gamma 越接近0说明越忽略长期奖励,\gamma 越接近1说明越关注长期奖励。折扣因子是在计算下一小节所讲的 "回报" 时起的作用。
所以,一个马尔可夫奖励过程可以使用符号 <\mathcal{S}, \mathcal{P}, r, \gamma> 来表示。
另外,使用符号 R_t 表示在 t 时刻获得的奖励。举例说明一下奖励函数 r(s) 与奖励 R_t 的区别。假设对于某个状态 s 其有0.8的概率获取1点奖励,有0.2的概率获得5点奖励。那么某次采样可能得到1点奖励,此时 R_t=1,另一次采样可能得到5点奖励,此时 R_t=5。而其奖励函数表示的是该状态可以获得的奖励的期望,永远为 r(s)=0.8*1+0.2*5=1.8。也就是说,奖励函数 r(s) 是不随时刻 t 变化、不随采样次数变化的;而奖励 R_t 则是某次采样的具体结果。
3.2 回报#
在马尔可夫奖励过程中,从 t 时刻的状态 S_t 开始,直到终止状态,所有奖励的衰减之和称为回报,使用符号 G_t 表示。其公式为:
其中 \gamma 是折扣因子,R_t 是在 t 时刻获得的奖励,都在上一小节介绍过了。
3.3 价值函数#
在马尔可夫奖励过程中,一个状态的期望回报(即从这个状态开始未来累积奖励的期望)称为这个状态的价值(value),所有状态的价值就构成了期望函数(value function),其公式为:
3.4 贝尔曼方程#
3.4.1 贝尔曼方程推导#
从上述价值函数出发,可以推导出贝尔曼方程(Bellman equation),推导过程如下所示:
上述推导过程的最后一行在刚开始看的时候完全无法理解,主要不理解的是为什么能够对价值函数 V(R_{t+1}) 求期望,也就是公式 E[V(R_{t+1})] 是什么意思?这里专门对最后一行的含义做一下解释。
公式中的 [|S_t=s] 意思是在时刻 t 状态为 s。公式中的 R_t 表示在时刻 t 获得的奖励。最主要是公式中的 E[V(R_{t+1})] 的含义是什么。
从之前的定义已经知道 V(s) 表示的是当前时刻 t 的状态为 s,从当前时刻到序列结束所获得的所有回报 G 的期望。在该定义中非常重要的一点是:当前时刻 t 的状态是固定的,就是状态 s,而不是状态集合 \mathcal{S} 中任何其他的状态。假设现在只知道时刻 t 是状态 s,对于时刻 t+1 以及之后的时刻是什么状态都是未知的,那么如何表示从时刻 t+1 直到序列结束所获得的所有回报的期望呢?可以遍历 t+1 时刻的所有可能的状态,求出每个状态的价值,然后就可以求出期望了,这个过程使用公式表示就为:E[V(R_{t+1})]=\sum_{s^\prime \in \mathcal{S}} p(s^\prime) V(s^\prime)。所以符号 E[V(R_{t+1})] 的含义是:在不知道 t+1 时刻是什么状态的情况下,从 t+1 时刻到序列结束所获得的所有回报 G 的期望。
然后根据上述推导过程的最后一行就有了贝尔曼方程,公式如下:
3.4.2 贝尔曼方程直观理解#
从形式上来看,贝尔曼方程其实是状态 s 的价值和其下一个状态 s^\prime 的价值的递归式。下面从直观上说明一下贝尔曼方程表示的意思。等号左侧是状态 s 的价值,它等于两部分求和。一部分是当前状态 s 的奖励期望,另一部分是衰减后的下一状态 s^\prime 的价值的加权和。加权和中的权重就是状态 s 转移到状态 s^\prime 的概率。
对于状态集合 \mathcal{S} 中的任何一个状态 s,贝尔曼方程都是成立的。
3.4.3 贝尔曼方程矩阵形式#
下面把贝尔曼方程写成矩阵形式。假设马尔可夫奖励过程有 n 个状态,即 \mathcal{S} = \{s_1, s_2, ..., s_n\},将所有状态的价值表示成一个列向量 \mathcal{V} = [V(s_1), V(s_2), ..., V(s_n)]^\top,把奖励函数也表示成一个列向量 \mathcal{R} = [r(s_1), r(s_2), ..., r(s_n)]^\top,然后就有贝尔曼方程的矩阵形式:
在公式(7)中 \mathcal{R}、\mathcal{P}、\gamma 都是已知量,只有 \mathcal{V} 是未知的,所以这里是可以直接求解其解析解的,做一下简单的变形即可,如下所示:
根据上式就可以通过 \mathcal{R}、\mathcal{P}、\gamma 求解出 \mathcal{V},这种方法的时间复杂度为 O(n^3),其中 n 是状态的个数,因此只有当 n 比较小时才能够使用这种方法,否则的话就太慢了。
4、马尔可夫决策过程(MDP)#
4.1 决策过程#
马尔可夫决策过程(Markov decision process)一般使用 <\mathcal{S}, \mathcal{A}, \mathcal{P}, r, \gamma> 来表示。其中 \mathcal{S} 表示有限个状态的集合,\mathcal{A} 是动作的集合,\gamma 是衰减因子。
r(s, a) 是奖励函数,注意此时的奖励函数既跟 s 有关,也跟 a 有关。
P(s^\prime|s, a) 是状态转移函数,其含义是在状态 s 执行动作 a 之后达到状态 s^\prime 的概率。在马尔可夫决策过程这里已经不再使用状态转移矩阵了,而是使用状态转移函数,这个更具有通用性。
4.2 策略#
智能体的策略(policy)使用符号 \pi 来表示,即:\pi(a|s) = P(A_t=a|S_t=s),其含义是在状态 s 下采取动作 a 的概率。
确定性策略(deterministic policy)指每个状态确定对应一个动作。
随机性策略(stochastic policy)指在每个状态时,采取哪个action是一个概率分布。在该概率分布中进行采样之后会得到一个具体的状态。
4.3 状态价值函数#
对于马尔可夫决策过程,其奖励函数为 r(s, a),可以看出其既与 s 有关,也与 a 有关,所以其价值函数也是有两个,分别是这一小节的状态价值函数和下一小节的动作价值函数。
状态价值函数(state-value function)使用符号 V^\pi(s) 表示,定义是从状态 s 出发遵循策略 \pi 所能获得的回报的期望。公式为:
4.4 动作价值函数#
动作价值函数(action-value function)使用符号 Q^\pi(s,a) 表示,定义是在遵循策略 \pi 时,对当前状态 s 执行动作 a 之后,所能获得的回报的期望。公式为:
然后看下状态价值函数 V^\pi(s) 与动作价值函数 Q^\pi(s, a) 之间的转换关系公式:
4.5 贝尔曼期望函数#
还是要记着贝尔曼期望函数就是价值函数的递归式。那么,作为递归式,状态价值函数的贝尔曼期望函数就是 V^\pi(s) 与 V^\pi(s^\prime) 的关系。动作价值函数的贝尔曼期望函数就是 Q^\pi(s,a) 与 Q^\pi(s^\prime, a^\prime) 的关系。
状态价值函数的贝尔曼期望函数公式如下:
动作价值函数的贝尔曼期望函数公式如下:
关于这两个贝尔曼期望方程的直观理解,和第 3.4 部分对贝尔曼方程的直观说明是基本相似的。