Actor-Critic#
1、Policy Gradient 回顾#
在 policy gradient 中,求解梯度使用的是下式:
在上述公式中 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n 这一项表示的是给定状态 s_t^n 之后策略采取了动作 a_t^n 所能够获取到的回报G。减去 b 的作用是让括号里的这一项有正有负。
另外还把 \Big( \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n - b \Big) 这一项使用符号 A^n(s_t^n, a_t^n) 表示,称为 advantage function。
在之前的内容中已经讨论过了,梯度公式中的 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n 这一项,也就是回报 G 的方差非常大,方差大就导致训练起来非常困难。而如果这里使用回报 G 的期望替代的话,就不会有方差太大的问题了。
之前介绍的 Q-learning 方法就是在估计价值函数,而价值函数的定义正是回报 G 的期望,所以就会想到使用 Q-learning 方法替换掉这里的 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n。
2、Actor-Critic#
2.1 Actor-Critic#
先来回顾一下之前的价值函数的公式和其含义。
动作价值函数的公式如下,其含义为给定了某个状态且策略采取了某个动作之后,所获得的回报 G 的期望:
状态价值函数的公式如下,其含义为给定了某个状态之后,所获得的回报 G 的期望:
状态价值函数与动作价值函数的转换公式如下,在这里状态价值函数可以看作是动作价值函数的期望:
当然状态价值函数和动作价值函数之间的转换关系还有下式,不过在这里没有使用到这个公式:
接下来就可以分析一下了。在公式(1)中的 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n,也就是回报 G 的方差较大,想替换为期望,而动作价值函数的公式(2)就是给定了某个状态且策略采取了某个动作之后,所获得的回报 G 的期望。所以这里可以使用动作价值函数替换掉 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n。然后在公式(1)中还有减去 b 这么一个操作,在之前的讨论中 b 一般是 \sum_{t^\prime=t}^{T_n} \gamma^{t^\prime - t} r_{t^\prime}^n 的期望,这样能够保证减去 b 之后有正有负,现在替换成动作价值函数 Q^\pi(s, a) 之后,这里的 b 就最好是 Q^\pi(s, a) 的期望。由公式(4)可以看出状态价值函数 V^\pi(s) 就可以看作是动作价值函数的期望,所以这里的 b 就采取状态价值函数。替换完之后的梯度公式如下:
这个公式就是结合了"基于策略的算法"与"基于值的算法"之后的结果。
2.2 A2C#
A2C 的全称为 Advantage Actor-Critic,就是 Actor-Critic 的改进版。公式(6)里面用到了两个价值函数:Q^\pi 和 V^\pi,也就对应着两个模型。再加上 actor 对应的模型,总共需要训练三个模型。模型越多,系统越复杂,也就越难以训练,所以这里考虑对两个价值函数变形,最终使用一个价值函数实现。
上一小节里面的公式(5)是动作价值函数与状态价值函数之间的转换关系,在这里主要是利用该公式。利用该公式将公式(6)中的 Q^\pi(s_t^n, a_t^n) 部分做如下的一些转换:
上述公式中的第一行就是由公式(5)得到的,这个不需要解释。第二行就不是恒等变换了,所以上面使用箭头来表示。箭头的左侧是一个期望,箭头的右侧是直接把期望符号去掉了,等于是某次采样值。使用单次采样值替换掉原来的期望值从理论上来说是近似相等的,它带来的问题是原来的期望值是比较稳定的,而采样值则是随机变量,相比起期望值就没有那么的稳定了。使用期望值的话,方差可以看作是0,而使用随机变量的话,方差肯定是大于0的。
将公式(7)带入到公式(6)里面之后得到新的梯度计算公式:
使用该公式就只需要一个模型来估计价值函数,以及一个 actor 对应的模型,总共需要训练两个模型,比之前少了一个。
关于这个改进,单从理论上来说,它的优点是将原来需要训练3个模型的系统简化为了需要训练2个模型的系统;它的缺点是将原来的期望变为了随机变量,也就是公式(7),这增加了训练的难度。所以从理论上来看不能完全说该改进一定有效。但是实验结果胜于理论,经过大量实验证明,经过该改进之后,最终训练出来的模型的效果是要明显优于改进之前的。
2.3 一些其他说明#
上面在介绍 Actor-Critic 方法时,是在"基于策略的算法"上引出来的。首先,有一个基于策略的方法,比如 policy gradient,该方法的梯度公式中需要求解回报 G 的期望,该值不容易直接求解,于是使用一个模型来估计该值。从这个角度来看,Actor-Critic 更像是一个基于策略的方法。
其实 Actor-Critic 还可以从另一个角度进行理解。首先,有一个基于值的算法,比如 DQN,该方法能够估计出一个动作价值函数。有了动作价值函数之后,只需要按照公式 a=\text{argmax}_a Q^\pi(s, a) 就可以获得策略 \pi 了,但是这个公式直接求解不好求,于是使用一个模型(也就是 actor 模型)来对该式进行求解。从这个角度来看,Actor-Critic 更像是一个基于值的方法。
总体来说,Actor-Critic 是结合了基于策略的算法和基于值的算法的,是目前来说效果最好的强化学习方案。
2.4 A2C 算法过程#
算法过程简述如下:
-
使用策略 \pi(也就是 actor 模型)与环境互动采样数据;
-
使用上一步采样到的数据 (s_t, a_t, r_t, s_{t+1}) 训练更新 critic 模型;
-
使用 critic 模型计算出的 advantage 训练更新 actor 模型;
这里记录几个之前一直存在疑惑的点:
-
critic 模型训练时的监督信号是由环境提供的。无论策略 \pi 选出来的策略是好的还是坏的,环境对其的反馈 r_t 是完全准确的,critic 模型拟合的是这个 r_t。所以,在训练 critic 模型时,策略 \pi 仅提供一个动作 a,至于这个策略是否是最优的,从理论上来说对于 critic 模型的训练是没有影响的;
-
actor 模型训练时的监督信号是由 critic 模型提供的。
总体来说:环境提供监督信号用于训练 critic 模型,然后 critic 模型提供监督信号用于训练 actor 模型。
3、A3C#
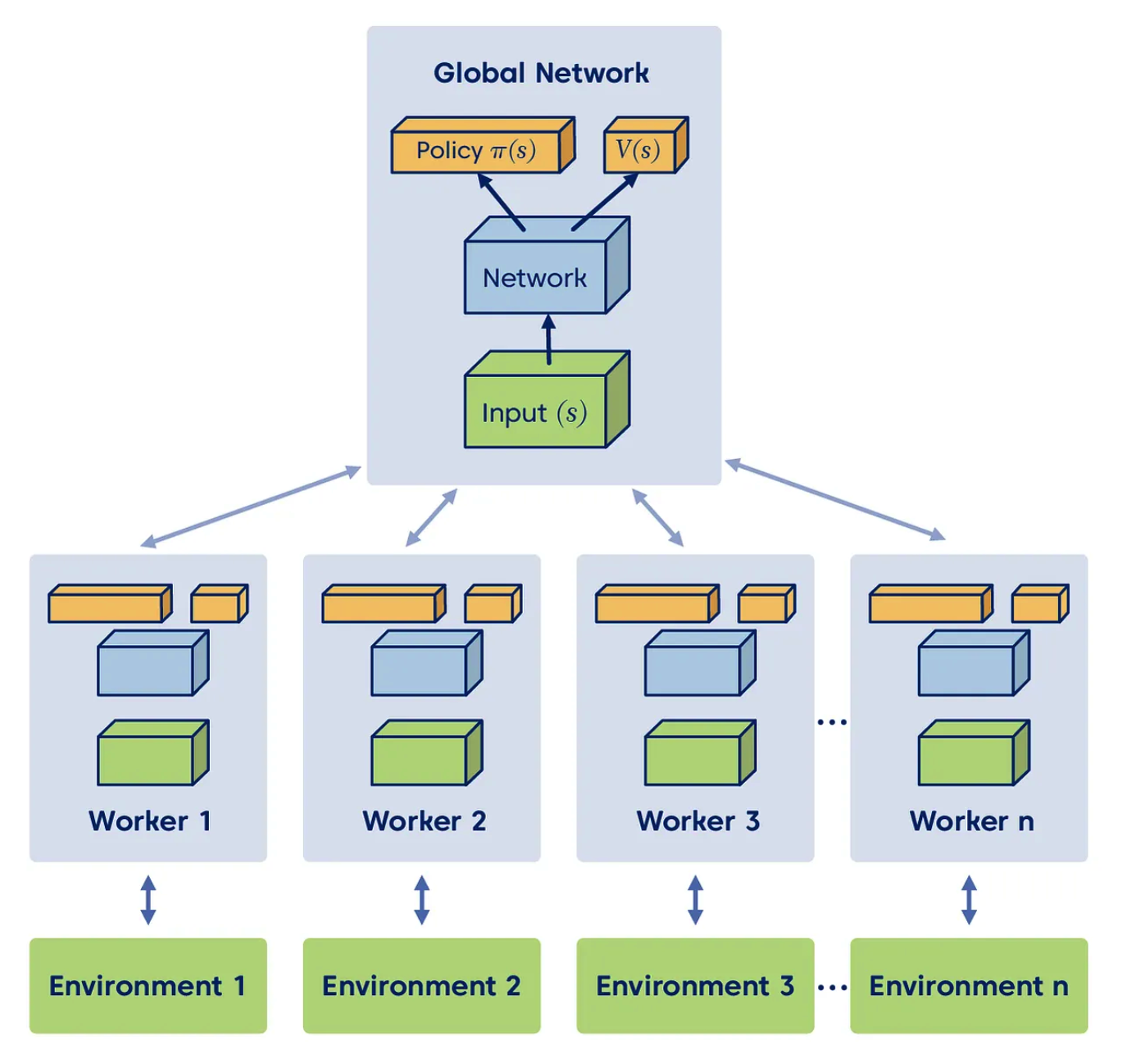
A3C 的全称为 Asynchronous Advantage Actor-Critic,这里的 Asynchronous 是异步的意思。如下图所示,首先有一个 global network,然后有多个 worker。每个 worker 把所有的模型的权重从 global network 那里拷贝出来一份,然后自己就开始进行训练流程:自己采样数据,自己计算梯度。当 worker 计算出来梯度之后,就把这个梯度传给 global network,然后 global network 就使用这个梯度更新自己的模型的权重,更新完成之后,worker 再从 global network 这里拷贝所有的模型的权重,如此往复。
注意,worker 是有多个的,所以对于某一个 worker 来说,它一开始拷贝了一份模型的权重出来,等到计算出梯度之后已经过去一段时间了,此时 global network 的权重可能已经被其他的 worker 回传的梯度更新过了,但是没有关系,不用管这个,还是将 worker 计算出的梯度直接作用到当前的 global network 的参数上。猜测这种操作的原因:一个原因是这样操作简单,另一个原因估计还是为了增加多样性和鲁棒性。