Layer Normalize#
1、LN的具体操作步骤#
1.1 简单描述#
layer norm 的计算过程大概有如下几步:
- 求每条数据各特征之间的均值和标准差;
- 每条数据的每个特征减去各自数据的均值,除上各自数据的标准差;
- 对经过上一步骤的输出再经过一个线性变换;
然后使用公式严谨的描述一下 layer norm 的计算过程。
1.2 LN的公式描述#
假设 LN 的输入为 m 条样本,每条样本为一个 n 维的向量。则输入数据的集合表示为:D = \{\vec{x_1}, \vec{x_2}, ..., \vec{x_m}\},其shape为 (m, n)。其中 \vec{x_i} = [x_i^{(1)}, x_i^{(2)}, ..., x_i^{(j)}, ..., x_i^{(n)}],右上角的 \cdot^{(j)} 表示该条数据的第 j 个特征;
LN 输出的shape与输入是完全相同的,记为 \{\vec{y_1}, \vec{y_2}, ..., \vec{y_m}\},其shape也为 (m, n)。其中 \vec{y_i} = [y_i^{(1)}, y_i^{(2)}, ..., y_i^{(j)}, ..., y_i^{(n)}];
则 LN 的公式如下所示:
上述最后一个公式的线性变换,是每个特征对应一个 \gamma 和 \beta。在该分析中,由于每条样本有 n 个特征,所以这个的 \gamma 和 \beta 各有 n 个。不同样本的同一个特征共享相同的 \gamma 和 \beta。
在 PyTorch 的官方文档中给出的公式为下面形式,虽然符号上有些差异,但是本质是相同的:
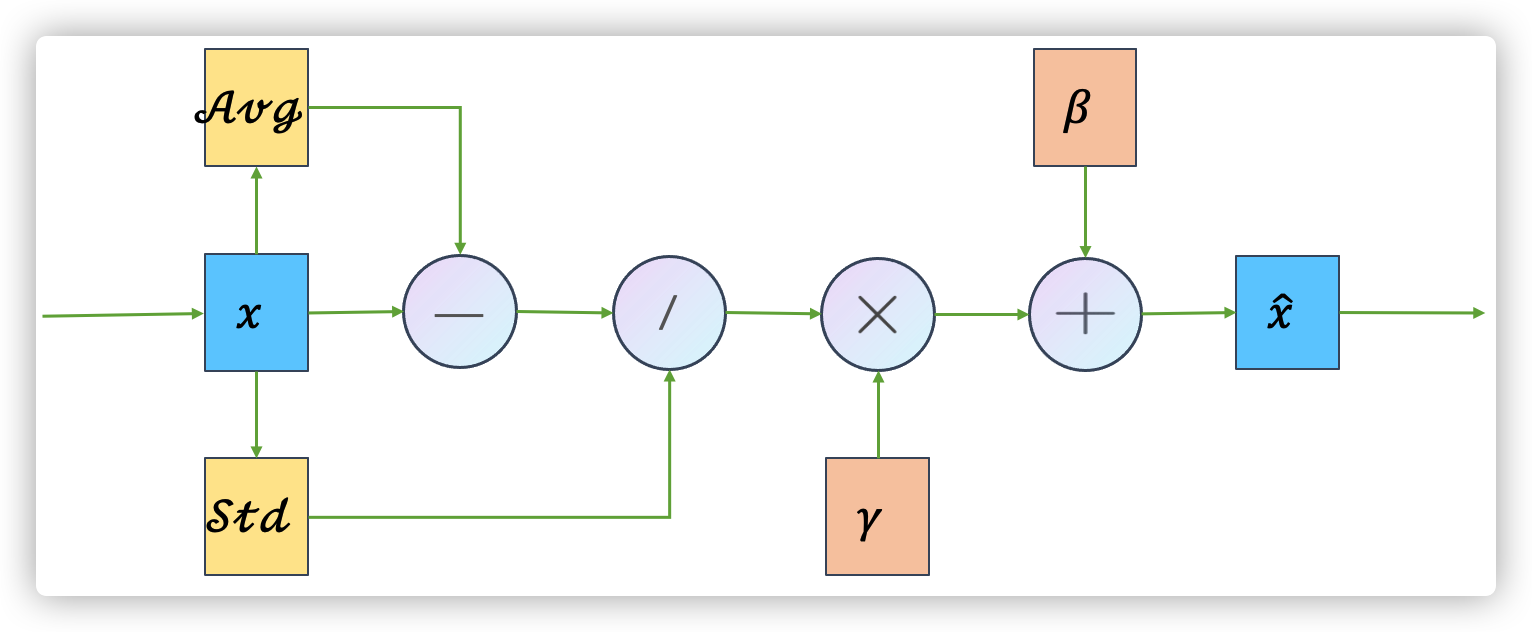
1.3 图像描述#
LN的操作还可以用如下图来表示。其中 "-"、"/"、"\times"、"+" 就是常规的减法、除法、乘法、加法。Avg 是均值,Std 是标准差。
2、LN 为了解决什么问题#
-
深度模型训练时所需要的计算资源非常大,想要减少训练所需时间的一个方法是:normalize the activities of neurons
-
增加训练过程的稳定性;
3、LN 出现之前是如何解决上述问题的#
LN 出现之前通过 BN 解决上述问题;
BN的优点:
- 可以解决 "convariate shift" 问题,缩短了模型训练所需的时间;
- 能够使饱和激活函数的输入落在非饱和区,增加了训练的稳定性;
BN的缺点:
- 当 batch size 特别小时,表现不好;
- 当每条数据的长度不一致时,比如文本数据,效果不好;
- 在 RNN 网络中,表现不好;
4、LN 的优势#
Normalization 的作用:降低了对参数初始化的需求,允许使用更大的学习率,有一定的正则化作用可抗过拟合,使训练更加稳定。
假设某一层输出的中间结果为 [m, T],m 为batch-size,T 为每条数据的特征数量,那么:
- BN 是对 m 这个维度做归一化;
- LN 是对 T 这个维度做归一化;
优势(以下都有待考证):
- 在 RNN 网络中,表现较好;
- 在 batch size 较小的网络中,表现较好;
- LN 抹杀了不同样本间的大小关系,保留了同一个样本内部的特征之间的大小关系,这对于时间序列任务或NLP任务来说非常重要;
5、LN效果测试代码#
import torch
import torch.nn as nn
# NLP例子,一般在NLP任务中,其维度为[batch_size, seq_len, hidden_dim],LayerNorm操作仅对最后一个维度做操作
batch, sentence_length, hidden_dim = 20, 5, 10
embedding = torch.randn(batch, sentence_length, hidden_dim)
print("LayerNorm前, 均值: ")
mean_result = embedding.mean(dim=-1) # 计算维度 hidden_dim 的均值
print([f"%.2f" % float(y) for x in mean_result.detach().numpy().tolist() for y in x][:20], "...")
print("LayerNorm前, 方差: ")
var_result = embedding.var(dim=-1) # 计算维度 hidden_dim 的方差
print([f"%.2f" % float(y) for x in var_result.detach().numpy().tolist() for y in x][:20], "...")
# 该LayerNorm层的input的维度为[*, hidden_dim],其仅对初始化时给定的hidden_dim这个维度做归一化
layer_norm = nn.LayerNorm(hidden_dim, elementwise_affine=False)
embedding = layer_norm(embedding)
print("LayerNorm后, 均值: ")
mean_result = embedding.mean(dim=-1) # 计算维度 hidden_dim 的均值
print([f"%.2f" % float(y) for x in mean_result.detach().numpy().tolist() for y in x][:20], "...")
print("LayerNorm后, 方差: ")
var_result = embedding.var(dim=-1) # 计算维度 hidden_dim 的方差
print([f"%.2f" % float(y) for x in var_result.detach().numpy().tolist() for y in x][:20], "...")
输出结果:
LayerNorm前, 均值:
['0.23', '0.23', '0.18', '-0.06', '-0.45', '-0.24', '0.34', '0.23', '-0.47', '-0.44', '0.12', '-0.26', '-0.37', '0.33', '-0.50', '0.11', '0.14', '0.37', '-0.12', '0.31'] ...
LayerNorm前, 方差:
['1.34', '0.51', '1.16', '0.90', '0.17', '0.50', '0.56', '0.61', '0.70', '1.06', '0.85', '1.26', '1.34', '1.45', '1.52', '0.75', '0.63', '1.37', '1.34', '1.51'] ...
LayerNorm后, 均值:
['0.00', '-0.00', '-0.00', '0.00', '0.00', '-0.00', '0.00', '0.00', '0.00', '0.00', '0.00', '0.00', '0.00', '-0.00', '0.00', '0.00', '-0.00', '-0.00', '-0.00', '0.00'] ...
LayerNorm后, 方差:
['1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11', '1.11'] ...
可以看出,经过归一化之后,其均值为0,方差为1.11(这里为什么是1.11,而不是1,还没搞清楚);
6、LN实现代码#
下面是按照自己的理解实现的 LayerNorm 的代码:
import torch
class LayerNorm(torch.nn.Module):
"""
该脚本中实现的 LayerNorm 与 pytorch 中的不太一样。pytorch 的 LayerNorm 的输入参数 normalized_shape 可以是
整型,也可以是 list,当其为 list 时表示对输入的后 len(normalized_shape) 个维度做归一化。而在该脚本中仅会对最后
一个维度做归一化,所以该脚本是一个简化版本。
"""
def __init__(self, hidden_size, epsilon=None):
super().__init__()
self.epsilon = epsilon if epsilon is not None else 1e-12
self.gamma = torch.nn.Parameter(torch.nn.ones(hidden_size))
self.beta = torch.nn.Parameter(torch.nn.zeros(hidden_size))
def reset_parameters(self):
torch.nn.init.ones_(self.gamma)
torch.nn.init.zeros_(self.beta)
def forward(self, inputs):
"""
这里假设输入inputs的维度为: [batch_size, seq_len, hidden_size],或者是其他高维度的张量,然后直接对
最后一个维度进行normalize。
"""
# ------------------- 各中间变量的维度说明 -------------------
# inputs : [batch_size, seq_len, hidden_size]
# avg : [batch_size, seq_len, 1]
# var : [batch_size, seq_len, 1]
# results : [batch_size, seq_len, hidden_size]
# results_affine : [batch_size, seq_len, hidden_size]
# --------------------------------------------------------
avg = torch.mean(inputs, dim=-1, keepdim=True)
var = torch.var(inputs, dim=-1, keepdim=True)
results = (inputs - avg) / torch.sqrt(var + self.epsilon) # 这里对 avg 和 var 的最后一个维度会进行广播
results_affine = self.gamma * results + self.beta
return results_affine
7、ConditionalLN实现代码#
另外 conditional layer norm 的实现代码也放在这里,原理见:
https://kexue.fm/archives/7124
import torch
class ConditionalLayerNorm(torch.nn.Module):
def __init__(self, hidden_size, conditional_hidden_size=None, epsilon=None):
super().__init__(self)
self.hidden_size = hidden_size
self.conditional_hidden_size = conditional_hidden_size
self.epsilon = epsilon if epsilon is not None else 1e-12
self.gamma = torch.nn.Parameter(torch.ones(hidden_size))
self.beta = torch.nn.Parameter(torch.zeros(hidden_size))
if self.conditional_hidden_size is not None:
self.linear_gamma = torch.nn.Linear(conditional_hidden_size, hidden_size)
self.linear_beta = torch.nn.Linear(conditional_hidden_size, hidden_size)
def reset_parameter(self):
torch.nn.init.ones_(self.gamma)
torch.nn.init.zeors_(self.beta)
def forward(self, inputs, condition=None):
avg = torch.mean(inputs, dim=-1, keepdim=True)
var = torch.var(inputs, dim=-1, keepdim=True)
results = (inputs - avg) / torch.sqrt(var + self.epsilon)
if self.conditional_hidden_size is not None and condition is not None:
condition_gamma = self.linear_gamma(condition)
condition_beta = self.linear_beta(condition)
self.gamma = self.gamma + condition_gamma
self.beta = self.beta + condition_beta
results = self.gamma * results + self.beta
return results
8、从 ConditionalLN 出发几种融合信息的方式#
融合到embedding层,这种是离散的,比如词信息、知识图谱信息等;
融合到信息传递时某个中间层,这种是连续的;
上述两种都是将新的信息融合到在模型中传递的信息流中,还有一种更特殊的是:将信息融合到模型权重中,比如 ConditionalLN。